Use Deep learning Python Annotator¶
This tutorial is based on Google Summer of Code(GSoC) 2018 program by Shingo Kitagawa. The GSoC project and proposal page is here.
The things below is done:
Run Python code with boost:python and boost:numpy from C++ annotator.
Implement Faster-RCNN Detection annotator with Python library Chainer.
Implement SSD Detection annotator with Python library Chainer.
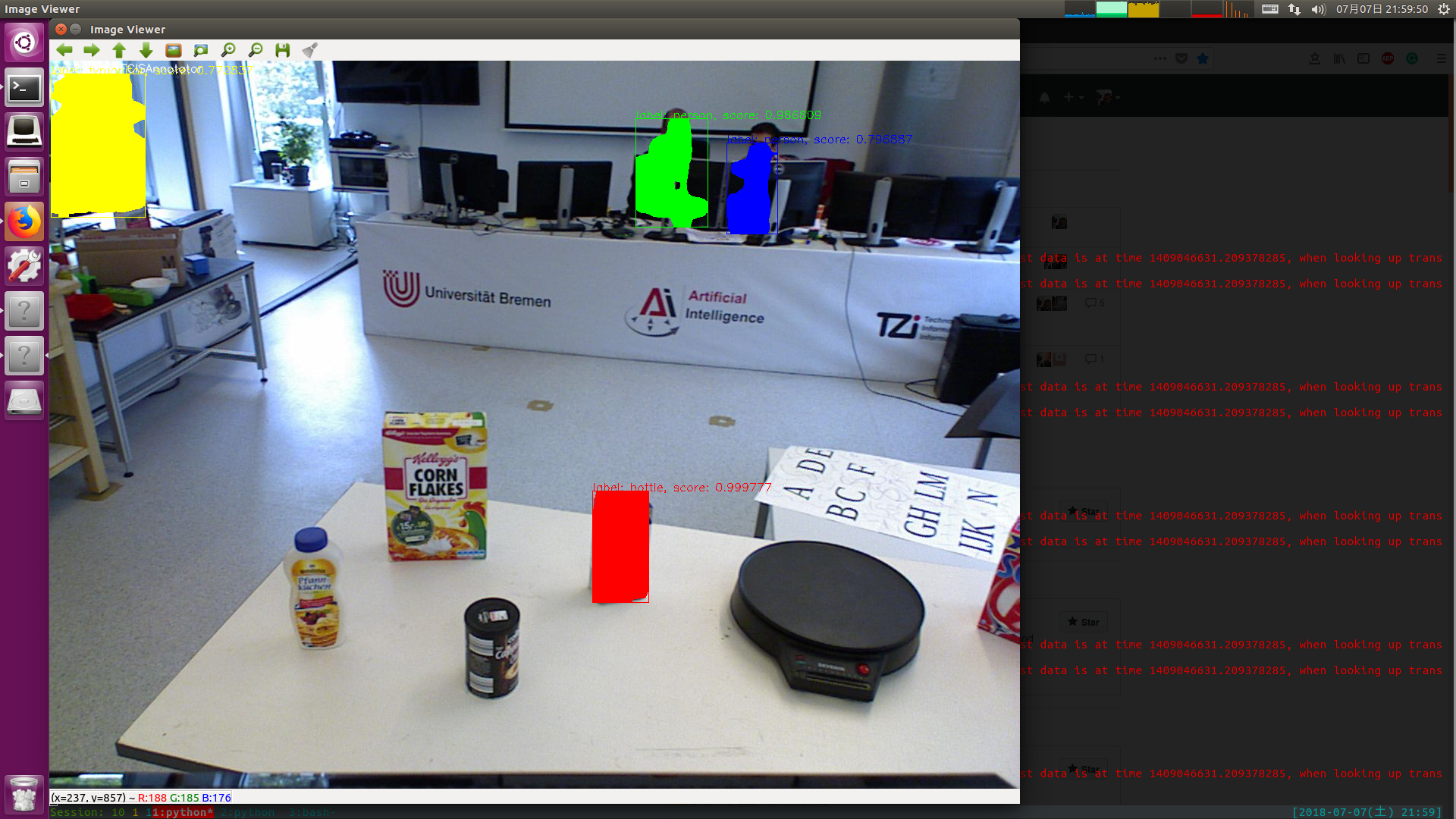
Implement FCIS Instace Segmentation annotator with Python library Chainer.
Implement Mask-RCNN Instace Segmentation annotator with Python library Chainer.

Requirement¶
numpy
boost::python
Additional requirement for GPU¶
CUDA
Pull request¶
For this feature, you need this PR: bbferka/rs_addons.
Usage¶
GPU usage¶
If you want to use GPU, you can specify GPU param as 1.
Default value is set as -1, which means no GPU mode, in descriptors/annotators/*.xml.
Train model usage¶
For Faster-RCNN and SSD, pretrained model with voc is available.
For FCIS and Mask-RCNN, pretrained model with sbd and coco is available.
The default pretrained model is set as coco in descriptors/annotators/*.xml.
Annotation description¶
All description is written in descriptors/annotators/*.xml.
Faster-RCNN¶
structure (default: faster_rcnn_vgg16, choices: [faster_rcnn_vgg16])
Network structure.
pretrained_model (default: voc0712, choices: [voc0712, voc07])
Pretrained model name.
gpu (default: -1)
GPU device number. -1 is no GPU mode.
score_thresh (default: 0.3, choice: [0.0-1.0])
Score threshold for classification.
SSD¶
structure (default: ssd300, choices: [ssd300, ssd512])
Network structure.
pretrained_model (default: voc0712, choices: [voc0712])
Pretrained model name.
gpu (default: -1)
GPU device number. -1 is no GPU mode.
score_thresh (default: 0.3, choice: [0.0-1.0])
Score threshold for classification.
FCIS¶
structure (default: fcis_resnet101, choices: [fcis_resnet101])
Network structure.
pretrained_model (default: coco, choices: [coco, sbd])
Pretrained model name.
gpu (default: -1)
GPU device number. -1 is no GPU mode.
score_thresh (default: 0.3, choice: [0.0-1.0])
Score threshold for classification.
Mask-RCNN¶
structure (default: mask_rcnn_resnet50, choices: [mask_rcnn_resnet50])
Network structure.
pretrained_model (default: coco, choices: [coco, sbd])
Pretrained model name.
gpu (default: -1)
GPU device number. -1 is no GPU mode.
score_thresh (default: 0.3, choice: [0.0-1.0])
Score threshold for classification.
Annotator configuration¶
Available annotator configuration is as below:
Faster-RCNN
Faster RCNN + VGG16 + voc07
Faster RCNN + VGG16 + voc0712
SSD
SSD300 + voc0712
SSD300 + voc0712
FCIS
FCIS + ResNet101 + sbd
FCIS + ResNet101 + coco
Mask-RCNN
Mask-RCNN + ResNet50 + sbd
Mask-RCNN + ResNet50 + coco
How to build rs_addons¶
mkdir catkin_ws/src -p
cd catkin_ws/src
git clone https://github.com/RoboSherlock/robosherlock.git
git clone https://github.com/RoboSherlock/robosherlock_msgs.git
git clone https://github.com/RoboSherlock/uimacpp_ros.git
git clone https://github.com/bbferka/rs_addons.git
git clone https://github.com/knowrob/knowrob.git
git clone https://github.com/code-iai/iai_common_msgs.git
cd ../
rosdep install --ignore-src --from-path src -y -r -i
catkin b
How to run demo¶
Faster-RCNN¶
roslaunch robosherlock rs.launch ae:=faster_rcnn_test
rosbag play --loop --clock test.bag
SSD¶
roslaunch robosherlock rs.launch ae:=ssd_test
rosbag play --loop --clock test.bag
FCIS¶
roslaunch robosherlock rs.launch ae:=fcis_test
rosbag play --loop --clock test.bag
Mask-RCNN¶
roslaunch robosherlock rs.launch ae:=mask_rcnn_test
rosbag play --loop --clock test.bag